|
|

|

|
| e-Pub |
Section: New Results
Motion & Sound Synthesis
Animating objects in real-time is mandatory to enable user interaction during motion design. Physically-based models, an excellent paradigm for generating motions that a human user would expect, tend to lack efficiency for complex shapes due to their use of low-level geometry (such as fine meshes). Our goal is therefore two-folds: first, develop efficient physically-based models and collision processing methods for arbitrary passive objects, by decoupling deformations from the possibly complex, geometric representation; second, study the combination of animation models with geometric responsive shapes, enabling the animation of complex constrained shapes in real-time. The last goal is to start developing coarse to fine animation models for virtual creatures, towards easier authoring of character animation for our work on narrative design.
Real-time physically-based models
Participants : Marie-Paule Cani, Francois Faure, Pierre-Luc Manteaux, Richard Malgat, Matthieu Nesme.
|
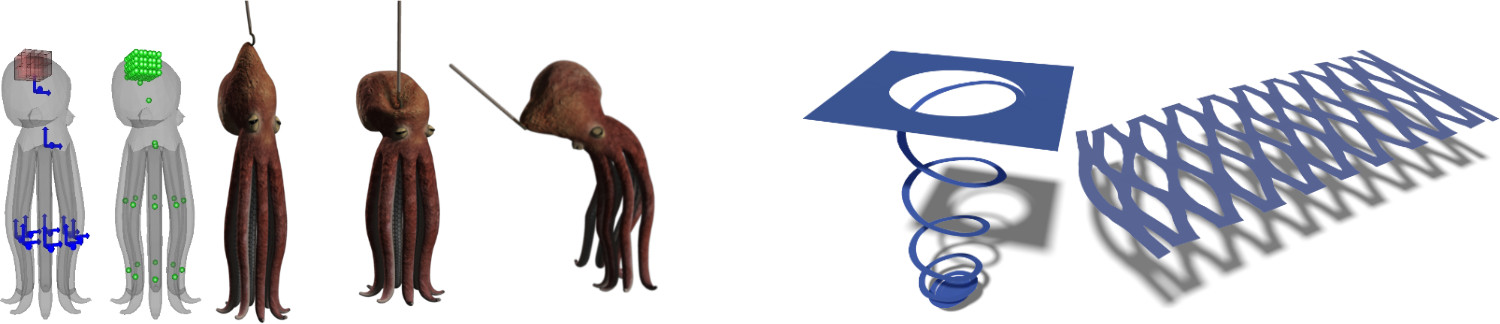
We keep on improving fundamental tools in physical simulation, such as new insight on constrained dynamics [15] at Siggraph. This allows more stable simulations of thin inextensible objects. A new extension of our volumetric contact approach (Siggraph 2010 and 2012) has been proposed [17] to apply rotational reaction to contact according to the shape of the contact area.
We have proposed an original approach to multi-resolution simulation, in which arbitrary deformation fields at different scales can be combined in a physically sound way[24] . This contrasts with the refinement of a given technique, such as hierarchical splines or adaptive meshes.
Following the success of frame-based elastic models (Siggraph 2011), a real-time animation framework provided in SOFA and currently used in many of our applications with external partners, we proposed an extension to the cutting of surface objects [25] , in collaboration with Berkeley, where Pierre-Luc Manteaux spent 4 months at the end of 2014.
Simulating paper material with sound
Participants : Marie-Paule Cani, Pierre-Luc Manteaux, Damien Rohmer, Camille Schreck.
|

Extending our results on animating paper crumpling, we proposed to synthesise the sound associated to paper material. We proposed a real time model dedicated to paper tearing. In this work, we model the specific case when two hands are tearing a flat sheet of paper on a table, in this case we synthesise procedurally the geometrical deformation of the sheet using conical surface, the tearing using a procedural noise map, and the tearing sound as a modified white noise depending on the speed of action. This work has been published in Motion in Games conference [23] .
We are also developing a sound synthesis method for paper crumpling. The geometrical surface deformation is analysed to drive a procedurally synthesized friction sound and a data driven crumpling sound. We are currently developing this work and did a first communication to AFIG conference [34] .
Animating anatomy
Participants : Armelle Bauer, Ali Hamadi Dicko, Francois Faure, Olivier Palombi, Damien Rohmer.
|
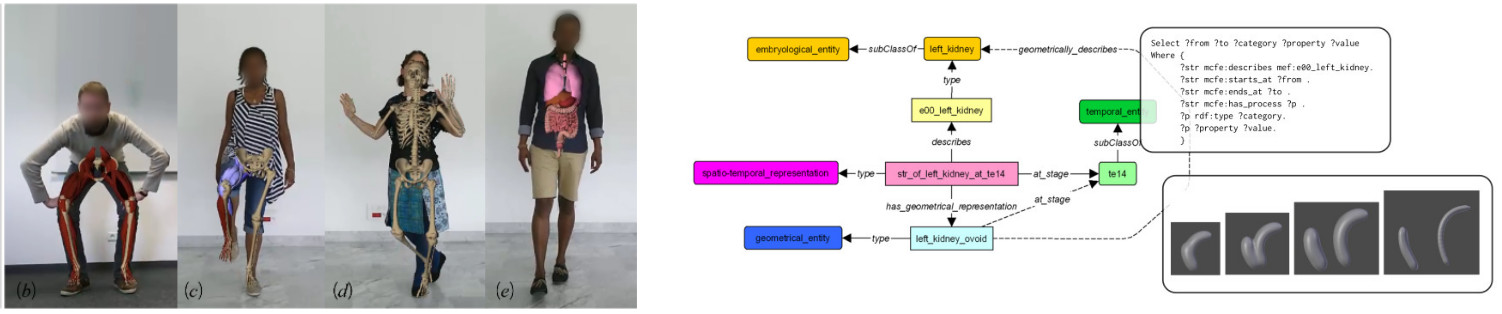
A real-time spine simulation model leveraging the multi-model capabilities of SOFA was presented in an international conference on biomechanics [7] . We also used a biomechanical model to regularize real-time motion capture and display, and performed live demos at the Emerging Technologies show of Siggraph Asia, Kobe, Japan [41] .
We are developing an ontology-based virtual human embryo development model. In one side, a dedicated ontology stores the anatomical knowledge about organs' geometry, relations, and development rules. On the other side, we synthesize an animated visual 3D model using the informations of the ontology. This work can be seen as a first step toward interactive development anatomy teaching, or simulation, based on an ontology storing existing medical knowledge. This work has been published in the Journal of Biomedical Semantics [12] .